Practical Bayesian Tomography
Cassandra E. Granade
Centre for Engineered Quantum Systems
joint work with Joshua Combes and D. G. Cory • [1509.03770](https://scirate.com/arxiv/1509.03770)
https://www.cgranade.com/research/talks/quics/09-2015/
$
\newcommand{\ee}{\mathrm{e}}
\newcommand{\ii}{\mathrm{i}}
\newcommand{\dd}{\mathrm{d}}
\newcommand{\id}{𝟙}
\newcommand{\TT}{\mathrm{T}}
\newcommand{\defeq}{\mathrel{:=}}
\newcommand{\Tr}{\operatorname{Tr}}
\newcommand{\Var}{\operatorname{Var}}
\newcommand{\Cov}{\operatorname{Cov}}
\newcommand{\rank}{\operatorname{rank}}
\newcommand{\expect}{\mathbb{E}}
\newcommand{\sket}[1]{|#1\rangle\negthinspace\rangle}
\newcommand{\sbraket}[1]{\langle\negthinspace\langle#1\rangle\negthinspace\rangle}
\newcommand{\Gini}{\operatorname{Ginibre}}
\newcommand{\supp}{\operatorname{supp}}
$
A Quick Note On Citations
10/abc $\mapsto$ https://dx.doi.org/10/abc
(Make your own at shortdoi.org!)
This talk can be summarized in one slide.
\begin{equation} \Pr(\text{model} | \text{data}) = \frac{\Pr(\text{data} | \text{model})}{\Pr(\text{data})} \Pr(\text{model}) \end{equation}
OK, Two Slides
Bayesian methods for experimental data processing work.
More Seriously...
Quantum tomography: Characterizing quantum states and processes from experimental data.
From a statistical perspective, this is a parameter estimation problem.
The Five Habits of Highly Effective Tomographic Procedures
- Provide accurate estimates. - Characterize their uncertainty. - Allow inclusion of prior knowledge. - Can track changes with time. - Come with “off-the-shelf” implementations.
We get the first two for free from taking a Bayesian perspective.
Challenges for Bayesian Tomography
- What prior should we use? - How should we update estimates in time? - How can we efficiently implement Bayesian tomography?
In this talk, we will address all three challenges.
But first,
A Short Primer on Bayesian Tomography
See also: - Jones [10/fpbsfw](https://dx.doi.org/10/fpbsfw) - Blume-Kohout [10/cn772j](https://dx.doi.org/10/cn772j)
Bayesian Parameter Estimation
Suppose we want to learn $x$ from data $D$. Then \[ \Pr(x | D) = \frac{\Pr(D | x)}{\Pr(D)} \Pr(x) \] is the posterior distribution over $x$.
$\Pr(x | D)$ describes what we know about $x$.
We estimate $x$ by the expectation value \[ \hat{x} = \expect[x | D] = \int x\,\Pr(x|D)\, \dd x. \]
This estimator is optimal for the mean squared error.
We estimate our error in the same way: \begin{align*} \expect[(x - \hat{x}(D))^2 | D] & = \expect[(x - \expect[x | D])^2 | D] \\ & = \Var(x | D). \end{align*} For multiple parameters, \[ \expect[(\vec{x} - \hat{\vec{x}})^\TT (\vec{x} - \hat{\vec{x}}) | D] = \Tr(\Cov(\vec{x} | D)). \]
More generally, \[ \hat{f} = \expect[f(x) | D]. \]
$\Pr(D | x)$ is a likelihood function that specifies an experimental model.
For state tomography, our likelihood is Born's rule, \[ \Pr(E | \rho) = \Tr[E \rho], \] where $\rho$ is a state and $E$ is a measurement effect.
Thus, Bayes' rule allows us to estimate $\rho$.
What About The Prior?
Want conjugate priors $f(x; y)$ to perform Bayesian inference: \begin{align*} \frac{\Pr(d | x)}{\Pr(d)} f(x; y) = f(x; y'(d, y)). \end{align*} Inference then consists of finding a “nice” form for $y'$.
Examples
- Gaussian priors are conjugate for Gaussian likelihoods - Gaussian priors are *approximately* conjugate for one-qubit Hamiltonian learning (Ferrie *et al.* [10/tfx](https://dx.doi.org/10/tfx)) - Beta distribution is conjugate for coin estimation
Frustrating to find conjugate priors for states that respect Hilbert space structure.
Wait, Beta Distribution?
The beta distribution is supported on $[0, 1]$ for all $\alpha, \beta > 0$ and is a conjugate prior to the binomial distribution.
We will use later that the beta distribution is always supported on 0.
Same techniques as before apply to enable learning snapshots of dynamics. Choi-Jamiołkowski isomorphism lets us rewrite process tomography as (ancilla-assisted) state tomography.
\[ \Tr[E \Lambda(\rho)] = \Tr[(\id \otimes E) J(\Lambda) (\rho^\TT \otimes \id)] = \sbraket{\rho^\TT, E | J(\Lambda)} \]
We parameterize a state $\rho$ as a real vector $\vec{x}$, \[ x_i = \sbraket{B_i | \rho} = \Tr(B_i^\dagger \rho), \] where $\{B_i\}$ is a basis of Hermitian operators.
By convention, $\Tr(B_i) = \delta_{i0} / \sqrt{D}$. E.g.:
- Pauli basis
- Gell-Mann basis
For state tomography, the BME is approximately optimal for the fidelity (Ferrie and Keung [1503.00677](https://arxiv.org/abs/1503.00677)).
The error in an observable $X$ is given by the covariance superoperator $\Sigma\rho = \Cov(\sket{\rho})$, \begin{align*} \Var(X) & = \Var_{\rho}[\langle X\rangle_{\rho}] + \langle X^2\rangle_{\expect[\rho]} - \langle X\rangle_{\expect[\rho]}^2 \\ & = \sbraket{X | \Sigma\rho | X} + \sbraket{X | X | \hat\rho} - \langle X\rangle_{\expect[\rho]}. \end{align*} (Blume-Kohout 10/cn772j)
In practice, Bayesian mean estimation is not tractable in the exact case. We thus use particle filtering to approximate.
- Huszár and Houlsby [10/s86](https://dx.doi.org/10/s86) - Ferrie [10/7nt](https://dx.doi.org/10/7nt)
Implemented by the QInfer library for Python.
Particle Filtering for Approximate Estimation
\begin{align} \Pr(\rho) & \approx \sum_{p\in\text{particles}} w_p \delta(\rho - \rho_p) \\ w_p & \mapsto w_p \times \Pr(E | \rho_p) / \mathcal{N} \end{align}
Mixtures of $\delta$-functions are conjugate priors for practically any likelihood.
Big advantage: we only need samples from the prior!
As we collect data, this becomes unstable, so we must resample.
Particle filtering is used in a range of quantum information applications.
- Hamiltonian learning: Granade *et al.* [10/s87](https://dx.doi.org/10/s87), Stenberg *et al.* [10/7nw](https://dx.doi.org/10/7nw) - Randomized benchmarking: Granade *et al.* [10/zmz](https://dx.doi.org/10/zmz) - Quantum Hamiltonian learning and bootstrapping: Wiebe *et al.* [10/tdk](https://dx.doi.org/10/tdk), Wiebe *et al.* [10/7nx](https://dx.doi.org/10/7nx) - Phase estimation: Wiebe and Granade [1508.00869](https://arxiv.org/abs/1508.00869)
Why Particle Filtering?
(You Forgot My Favorite Algorithm)
- MCMC: works, but isn't streaming or time-dependent. - Rejection filtering (Wiebe and Granade [1508.00869](https://arxiv.org/abs/1508.00869)): only keeps sufficient statistics; need more expressive instrumental distribution.
Other Advantages
Expressing as Bayesian parameter estimation / particle filtering problem affords us a few other advantages.
Region Estimation
A credible region $R_\alpha$ for $\rho$ satisfies \[ \Pr(\rho \in R_{\alpha} | D) \ge \alpha. \]
Construct from particle approximation to posterior, covariance regions (Granade *et al* [10/s87](https://dx.doi.org/10/s87)), convex hull or minimum-volume enclosing ellipse (Ferrie [10/tb4](https://dx.doi.org/10/tb4)).
Built-in to QInfer.
Model Selection
- Akaike / Bayesian information criterion: Guţă *et al.* [10/7nz](https://dx.doi.org/10/7nz), van Enk and Blume-Kohout [10/7n2](https://dx.doi.org/10/7n2) - Bayes factors: Wiebe *et al.* [10/tdk](https://dx.doi.org/10/tdk) \begin{equation} \text{BF}(A : B) = \frac{\Pr(A | \text{data})}{\Pr(B | \text{data})} \end{equation} - Model averaging: Ferrie [10/7nt](https://dx.doi.org/10/7nt)
Bayes factor–based model selection built-in to QInfer.
Hyperparameterization
\begin{align*} \text{Suppose } \vec{x} & \sim \Pr(\vec{x} | \vec{y}) \\ \text{Then, } \Pr(D | \vec{y}) & = \expect_{\vec{x} | \vec{y}} [\Pr(D | \vec{x}, \vec{y})] \\ & = \int \Pr(D | \vec{x}, \vec{y}) \Pr(\vec{x} | \vec{y})\,\dd\vec{x}. \end{align*} Marginalizing gives us a likelihood for the hyperparameters $\vec{y}$!
Allows us to include effects outside of Born's rule. For instance, non-Cauchy decoherence (Granade et al. 10/s87).
But how do we choose our prior? Let's get to the meat of things.
Informative Priors for Bayesian Tomography
In order to be useful, a prior over states should: - Have support over all states, - Allow us to encode our assumptions, and - Be efficient to draw samples from.
It helps to consider an uninformative prior first.
Ginibre Prior for Pure and Mixed States
- Let $X$ be a $N \times K$ matrix with complex Gaussian entries.
- $\rho \gets XX^\dagger / \Tr(XX^\dagger)$.
$\rank(\rho) = K$. If $K = 1$, $\rho$ is pure. If $K = N$, Hilbert-Schmidt prior.
NB: Choosing $X$ to be real gives Ginibre over redits.
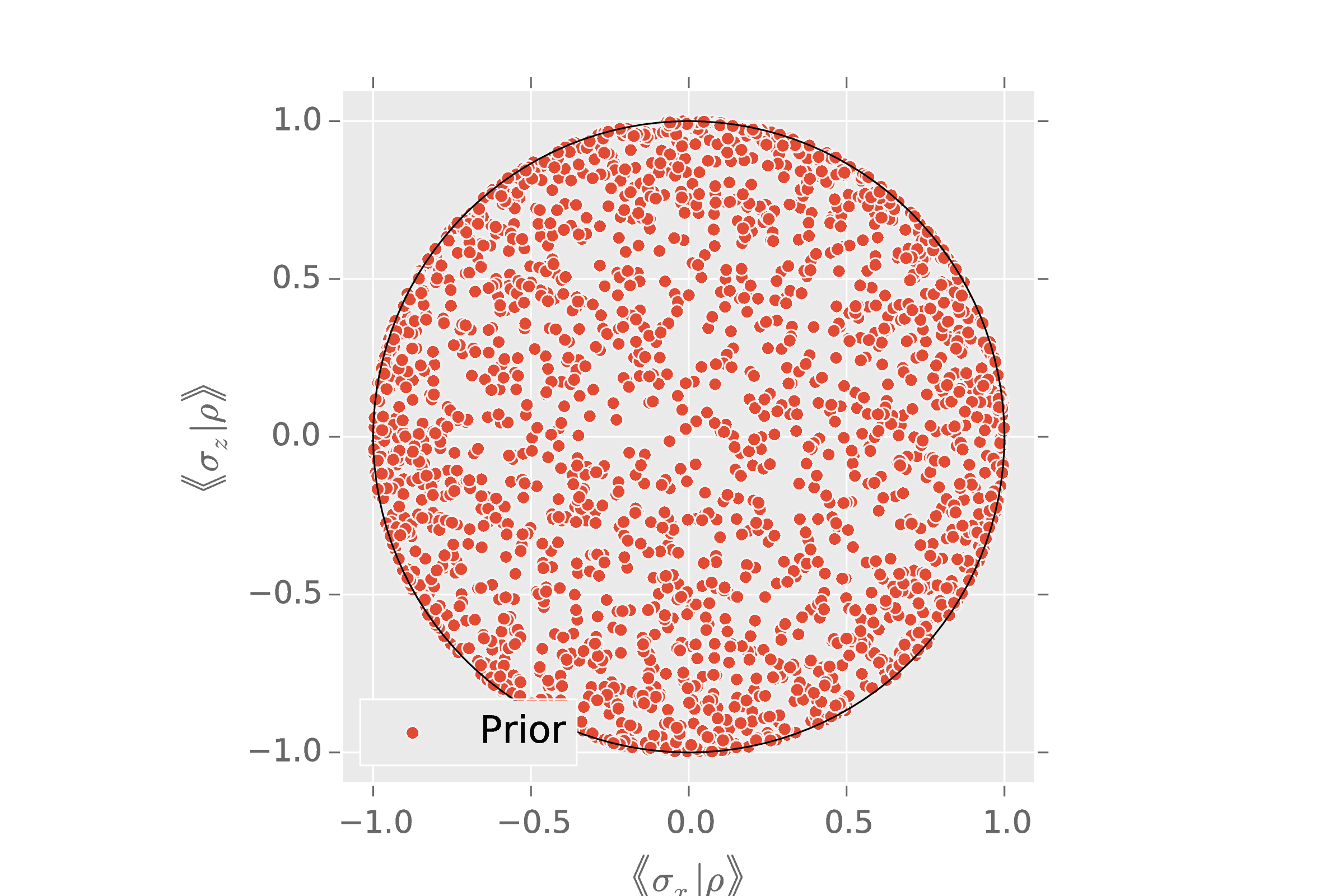
import qinfer as qi
basis = qi.tomography.pauli_basis(1)
prior = qi.tomography.GinibreReditDistribution(basis)
qi.tomography.plot_rebit_prior(prior, rebit_axes=[1, 3])
What makes $\Gini(N, K)$ uninformative? \[ \expect[\rho] = \id / N. \] The mean is the maximally-mixed state.
Other Useful Priors
- Haar, uniform over pure states - Bures, uniform over mixed states - BCSZ, uniform over CPTP maps
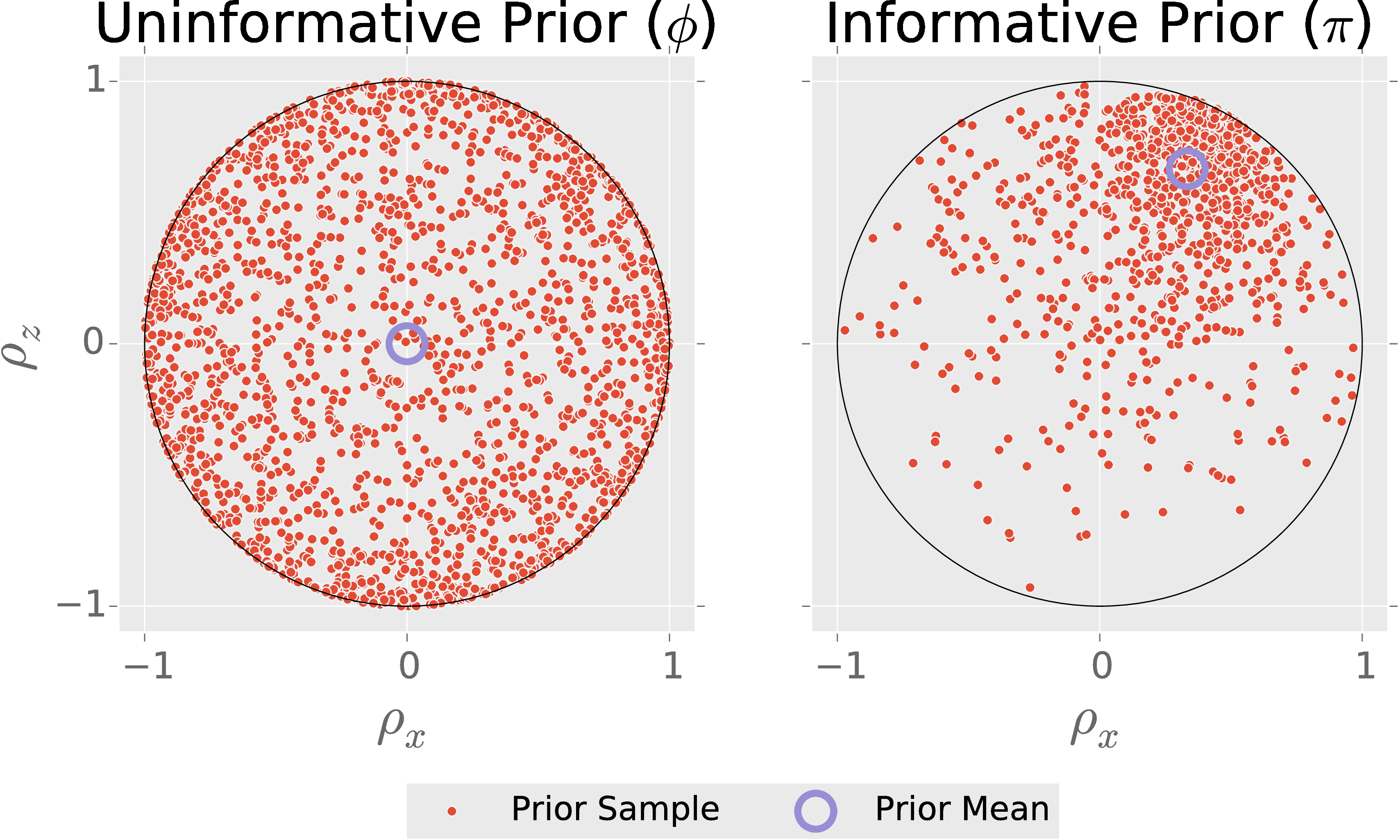
How do we add information to the prior, specifically the prior estimate state $\rho_\mu$?
Big idea: Use an ensemble of amplitude damping channels to transform a uniform prior.
Let $\phi$ be a fiducial prior. Then, for scalars $\alpha,\beta$ and a state $\rho_*$, draw $\rho_{\text{sample}}$ by:
- Draw $\rho \sim \phi$.
- Draw $\epsilon \sim \mathrm{Beta}(\alpha, \beta)$.
- $\rho_{\text{sample}} \gets (1 - \epsilon) \rho + \epsilon \rho_*$
NB: $\supp \pi \supseteq \supp \phi$
Choose $\rho_*$ s. t. $\expect_{\rho\sim\pi}[\rho] = \rho_\mu$:
\[ \rho_* = \left(\frac{\alpha + \beta}{\alpha}\right) \left( \rho_\mu - \frac{\beta}{\alpha+\beta} \frac{\id}{N} \right) \]
Choose $\alpha,\beta$ s. t. $\expect[\epsilon]$ is minimized: \[ \alpha = 1 \qquad \beta = \frac{\lambda_\min}{1 - N \lambda_\min}, \] where $\lambda_\min$ is the smallest eigenvalue of $\rho_\mu$.
That is, we contract the fiducial prior as little as possible to obtain the desired mean.
This construction preserves the support of our “flat” prior, takes $\rho_\mu$ as an input and can be easily sampled.
Inherits other assumptions by convexity (e.g.: rebit, CPTP, positivity, etc.).
Easy to Use
import qinfer as qi
import qutip as qt
I, X, Y, Z = qt.qeye(2), qt.sigmax(), qt.sigmay(), qt.sigmaz()
prior_mean = (I + (2/3) * Z + (1/3) * X) / 2
basis = qi.tomography.pauli_basis(1)
fiducial_prior = qi.tomography.GinibreReditDistribution(basis)
prior = qi.tomography.GADFLIDistribution(fiducial_prior, prior_mean)
QInfer's tomography support is backed by QuTiP.

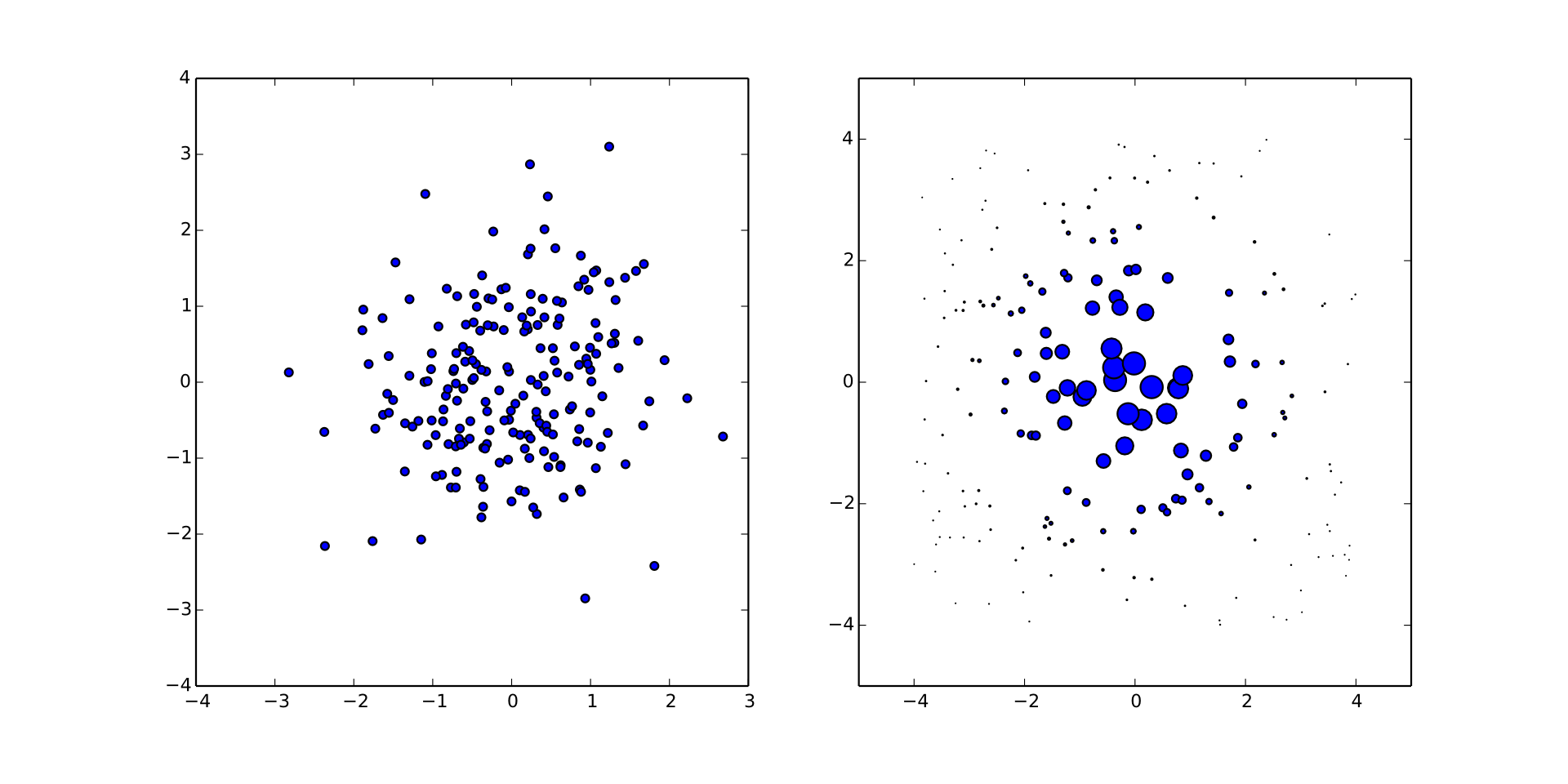
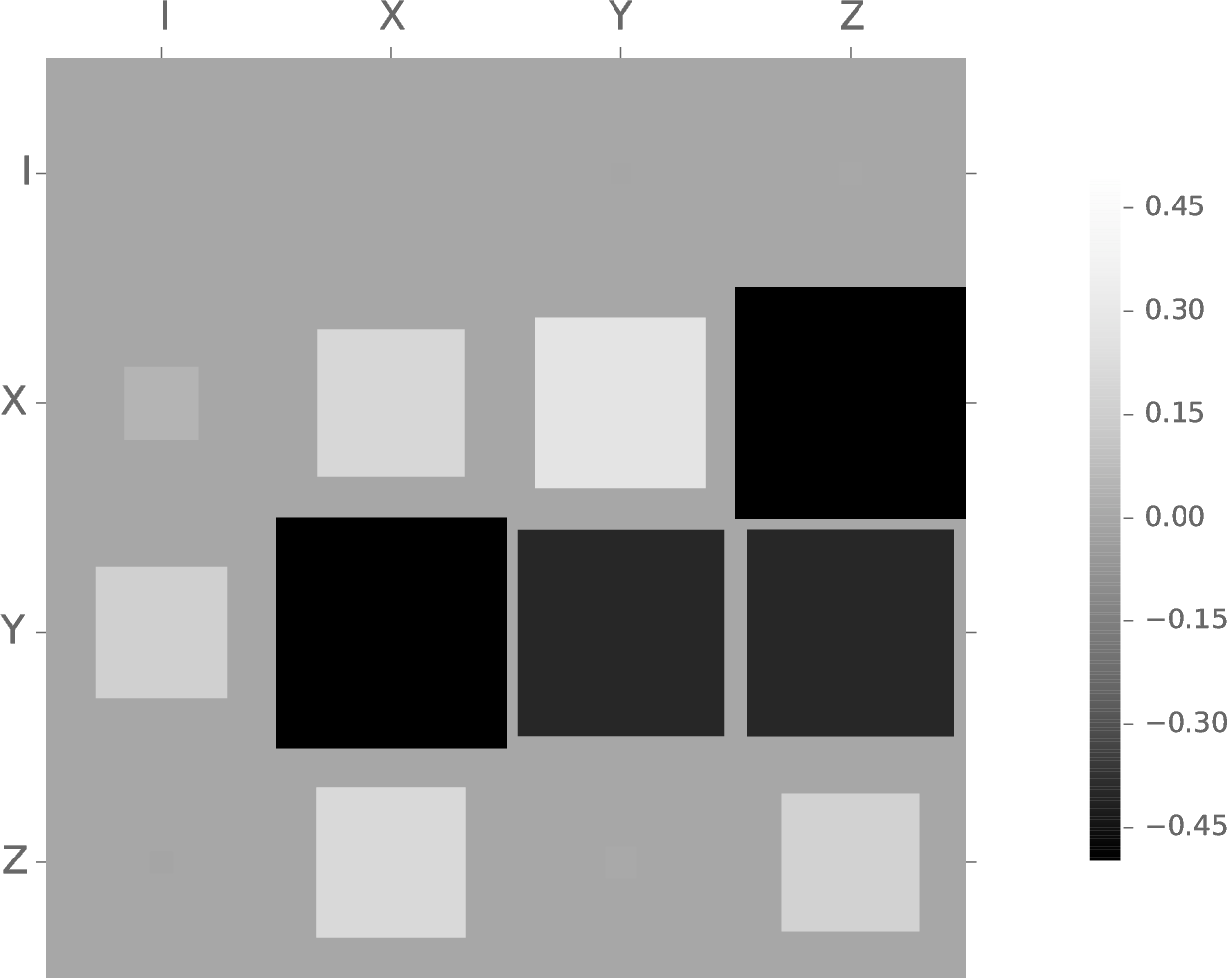
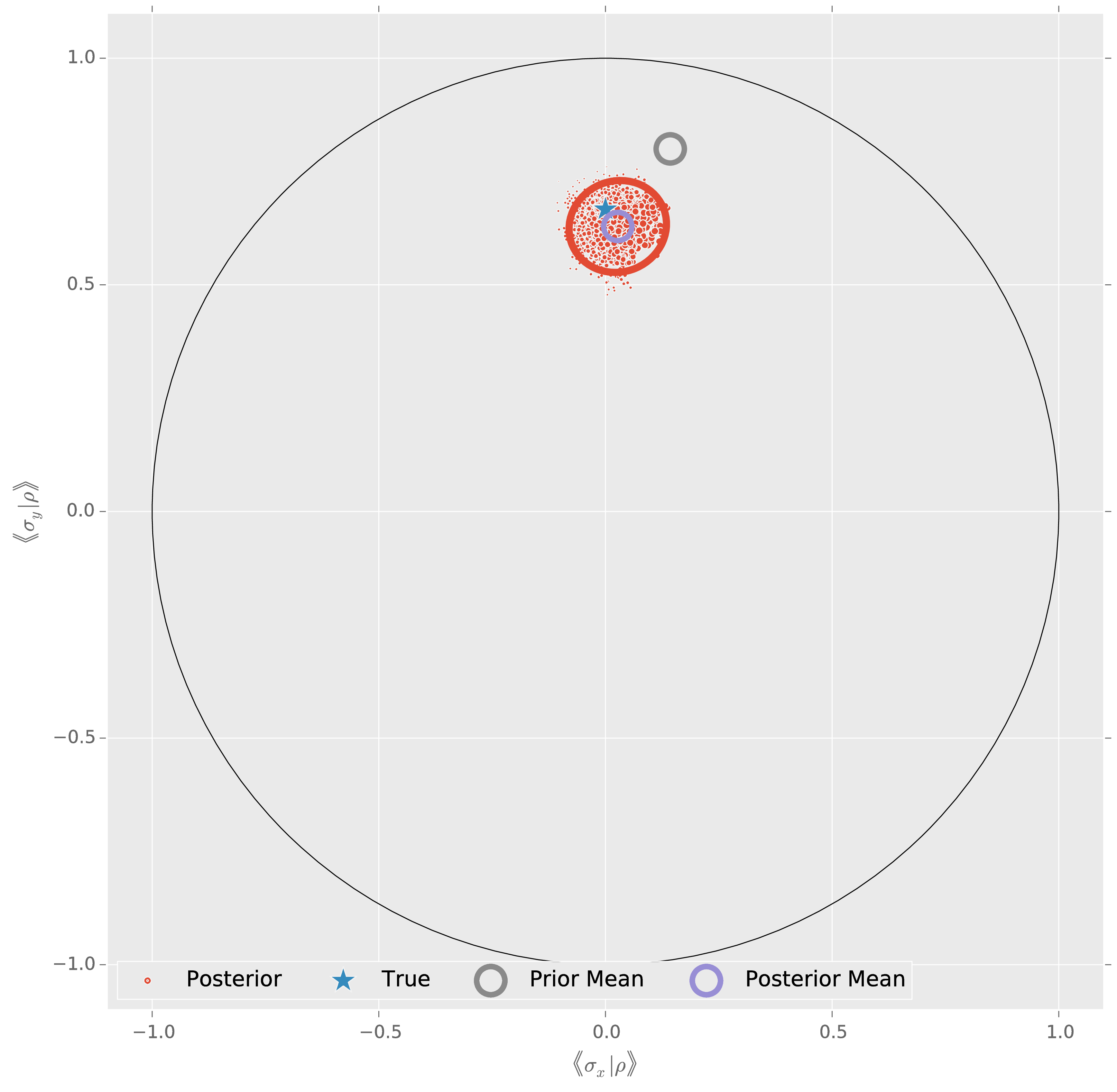
Prior Information Really Helps
Posterior covariance characterizes uncertainty.
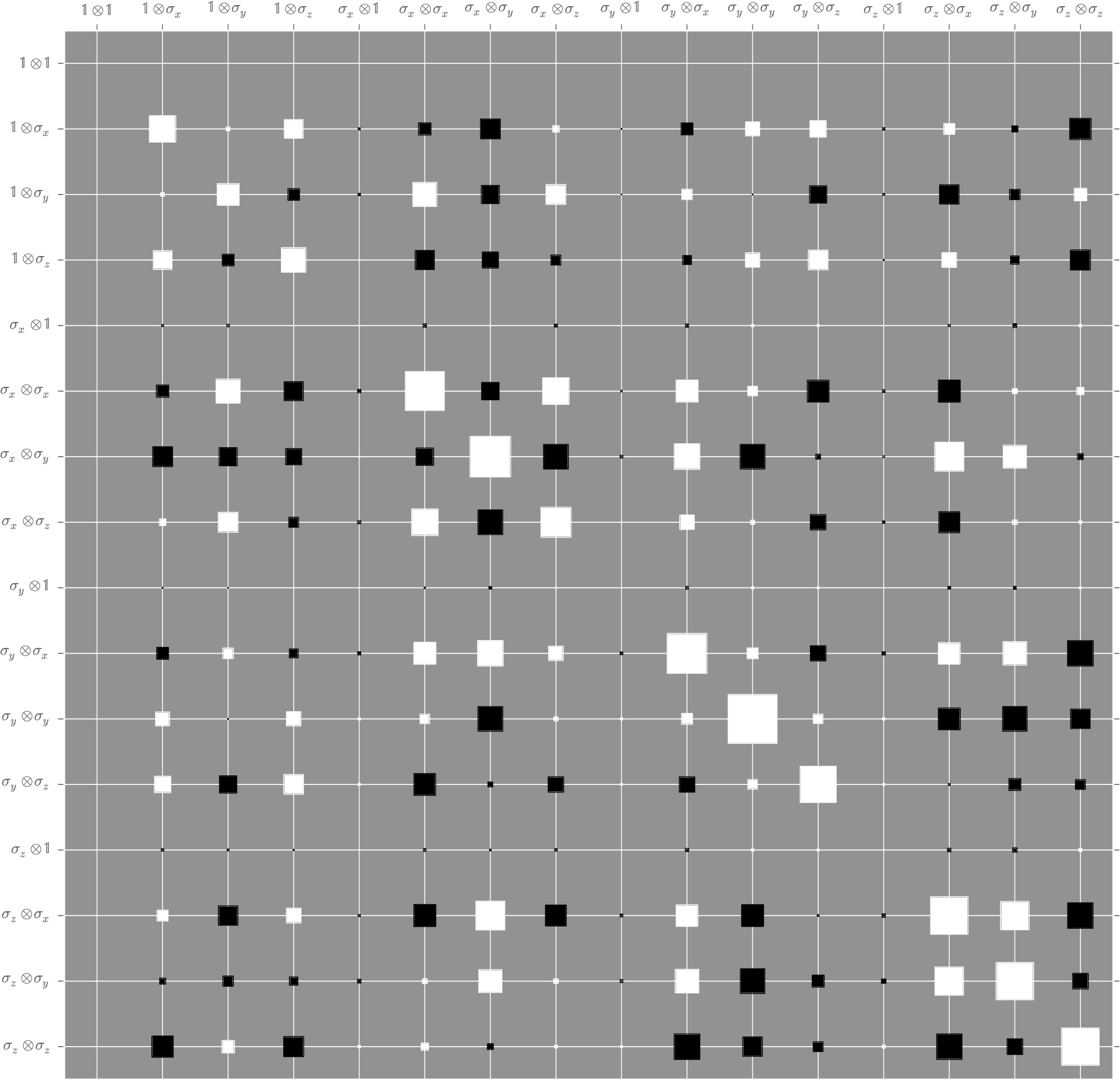
Principal channels tell us which components dominate our uncertianty.
How Do I Use This Bloody Thing?
(a quick tutorial)
All models are wrong, some are useful. —Chris Ferrie
We've seen how to create bases and priors, to finish we need a model, an updater and a heuristic.
model = qi.BinomialModel(qi.tomography.TomographyModel(basis))
The sequential Monte Carlo updater performs Bayes updates using particle filtering.
updater = qi.smc.SMCUpdater(model, 2000, prior)
heuristic = qi.tomography.RandomPauliHeuristic(updater,
other_fields={'n_meas': 40}
)
This heuristic measures random Paulis 40 times each.
I'm Sick of This— Let's Measure!
for idx_exp in xrange(50):
experiment = heuristic()
# This is where your data goes! 💗
# For now, we'll simulate. 💔
datum = model.simulate_experiment(true_state, experiment)
updater.update(datum, experiment)
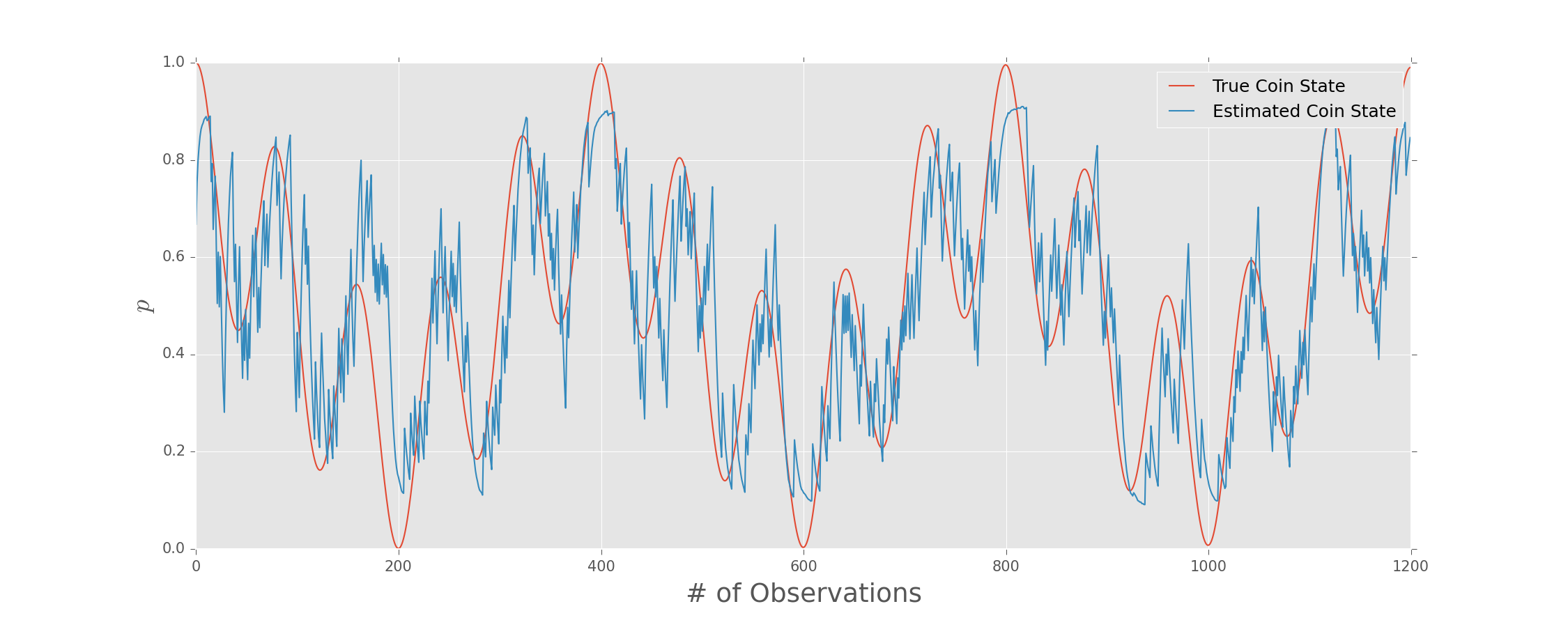
Tracking Time-Dependent States
Condensation Algorithm
Interlace Bayesian updates with diffusion \[ \rho(t_{k+1}) = \rho(t_k) + \Delta \eta. \] and truncation.
Draw each traceless parameter of the diffusion step $\Delta \eta$ from a Gaussian.
(Isard and Blake [10/cc76f6](https://dx.doi.org/10/cc76f6))
Co-Evolution for Fun and Diffusion Estimation
We don't need to assume a particular diffusion rate. Include as model parameter $\eta$, such that \begin{equation} \sigma = \sqrt{t_{k + 1} - t_k} \eta. \end{equation}
Bayesian updates on the state then “co-evolve” $\eta$ to learn diffusion rate.
We don't need to assume that the "true" state follows a random walk.